
Flexible Surgical Robot and Intelligent motion Assistive Technology
Research Mission
The first generation of surgical robots revolutionized laparoscopic surgery through the innovative robotic mechanism design and teleoperated motion control. While the success of the first generation technology has been tremendous, only less than 3% surgeries are performed using robot today due to the existing technical limitations. At CAIR, we believe the key to further unleash the potential of surgical robot lies in creating fully sensorized minimally invasive surgical robotic system with self-evolving intelligence. Such system will ensure surgical safety, free surgeons from labor-intensive tasks, enable unprecedented novel surgical treatments and thus ultimately improve surgical outcomes for patients.
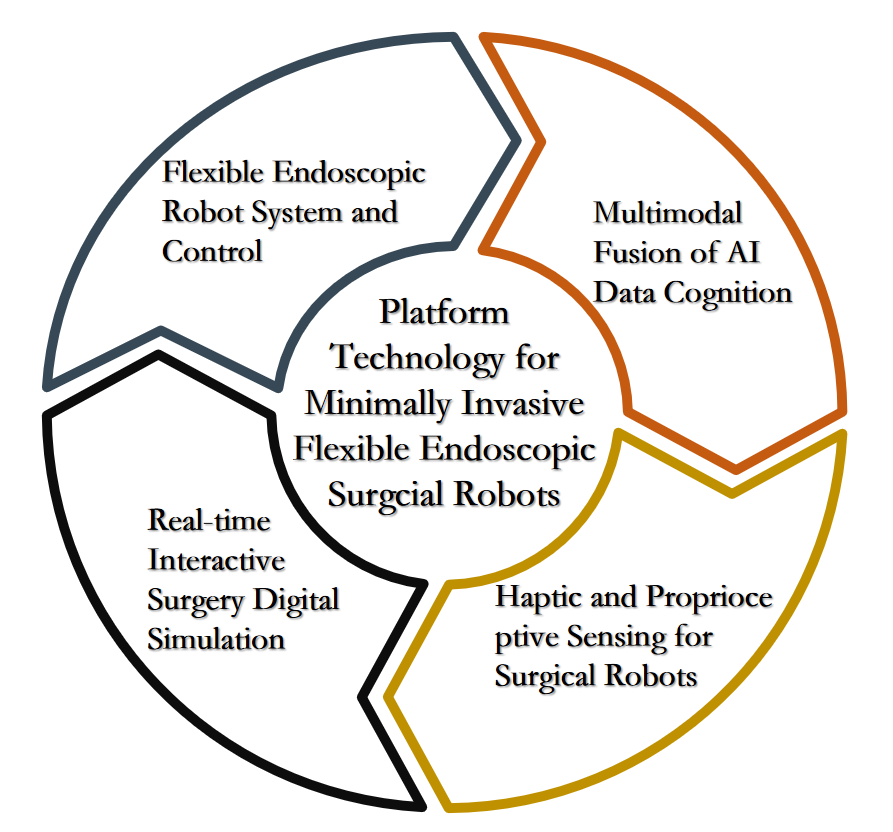
Research for Minimally Invasive Flexible Endoscopic Surgical Robots
Principal Investigator: Prof LIU Hongbin
Co-Investigator: Prof CHAN Tat Ming Danny(Dept of Surgery, CUHK)
MicroNeuro is the world's first flexible robotic system for minimally invasive neurosurgery. The system integrates technologies such as flexible endoscopy, precision control and artificial intelligence to address the challenges introduced by the fragile brain tissue, small space, and difficulty in surgical manipulation, breaking the limit of human hand-eye-brain capability. MicroNeuro can be used to perform deep-seated intracranial surgeries, such as ventricle surgeries, decompression for trigeminal neuralgia and cerebral hemorrhage, helping millions of patients to relieve pain and save lives.
Significance
MicroNeuro robot has significant clinical values for intracranial neurosurgery. Existing techniques mainly use rigid endoscope or microscope to reach the location of the surgical site. Thus, in order to artificially create a“linear”surgical trajectory, a large bone window needs to be created on the skull and healthy brain tissues need to be retracted. All of these manipulations introduce damage to the brain and increase the likelihood of surgical complication.
- Unlike existing techniques, MicroNeuro uses a flexible endoscope, allowing extra safety, dexterity and enabling nonlinear surgical trajectory.
- Using preoperative planning based on MRI images, MicroNeuro reaches the targeted location through the natural brain cavities in the least invasive manner.
- MicroNeuro is suitable for conducting most of intracranial surgeries minimally invasively, including cerebral hemorrhage decompression for trigeminal neuralgia, which could benefit millions of patients worldwide.
Achievements
MicroNeuro has conducted several cadaver trials of endoscopic third ventriculostomy and pineal biopsy for the treatment of pineal region germ cell tumours. Existing surgical approach needs two surgeons and often requires two invasive penetration trajectories to the cortex, which causes great damage to the normal brain tissue. The first time in the world, the team proved that using MicroNeuro, a single surgeon can complete all the required surgical tasks through one skull hole with one trajectory, and thus reducing brain tissue damage by at least 50%. More importantly, reduced invasiveness also led to less surgical complications.

Prof TM Chan and Prof H Liu conduct pineal biopsy using MicroNeuro during a cadaver trial
Research Strategy for MicroNeuro
MicroNeuro team aims to develop a fully sensorized, and AI-enabled minimally invasive surgical flexible robot for neurosurgery. The goal is to digitize surgery and realize standardized treatments to let high-quality medical service benefit more patients across the world. To achieve this goal, the team is striving to push the frontier of both theoretical and translational research in the following aspects:
- Solving the challenge of carrying out complex surgical manipulations within a very confine space, through novel instrument design and multi-modal fused motion control methodology;
- Developing advanced intraoperative sensing technologies for flexible surgical robots, including tactile sensing, shape sensing, localization and navigation;
- Developing a cutting-edge digital-twin neurosurgery simulation system, including surgical planning, real-time Augmented Reality and advanced machine intelligence, such as data-driven machine learning.
Media Coverage
MicroNeuro has attracted much attention within Hong Kong and Mainland China. During 20 th Anniversary of the HKSTP on July 6, 2022, MicroNeuro was selected as one of the seven latest Innovations demonstrated to the Chief Executive, Mr. Lee Ka-Chiu. MicroNeuro has been reported by numerous media from both Hong Kong and Mainland China as shown below:
Ta Kung Pao(大公报A5港闻)2022-08-21
People's Daily Online(人民网)2022-10-7
Ta Kung Pao(大公报A5要闻)2022-11-11
Prize
MicroNeuro won the first BOCHK Science and Technology Innovation Prize, one of the highest award for tech-innovation in Hong Kong—The review committee commented that “This work has put Hong Kong on the international map in the field of robotic neurosurgery research, underscoring Hong Kong’s excellence in medical robotic research and clinical research for neurosurgery.”
Contacts
For research collaboration: hongbin.liu@cair-cas.org.hk
For PR and industrial collaboration: jun.xu@cair-cas.org.hk
Principal Investigator: Prof ZHANG Zhongkai
PRIME is the world's first real-time physical simulator (Finite Element Method & Material Point Method) for neurosurgery. Features:
Real-time Physical Simulation
- Fast fluid-solid coupling simulation with 1000 fps for 30 thousand particles using a single 4090 GPU;
- Fast FEM simulation with 20 fps for 30 thousand elements using a single CPU thread;
- Real-time simulation of brain-robot large deformation with multiple contacts.
Fast fluid-solid coupling simulation
Real-time simulation of brain-robot large deformation
Navigation with Digital Twin Simulation
- Real-Time Feature Registration Method
- Automatic semantic registration using a 3D camera, achieving an accuracy of 1mm.
- Real-time patient registration with CT/MRI at a frequency of 10Hz.
- Digital twin navigation system
- Real-time navigation with 30 fps, 1.5mm and 0.1°accuracy.
- Navigation with real-time physical and deformation simulation.
Real-time surgery navigation
Contacts
For research collaboration: zhongkai.zhang@cair-cas.org.hk
For PR and industrial collaboration: jun.xu@cair-cas.org.hk
Principal Investigator: Dr HU Jian
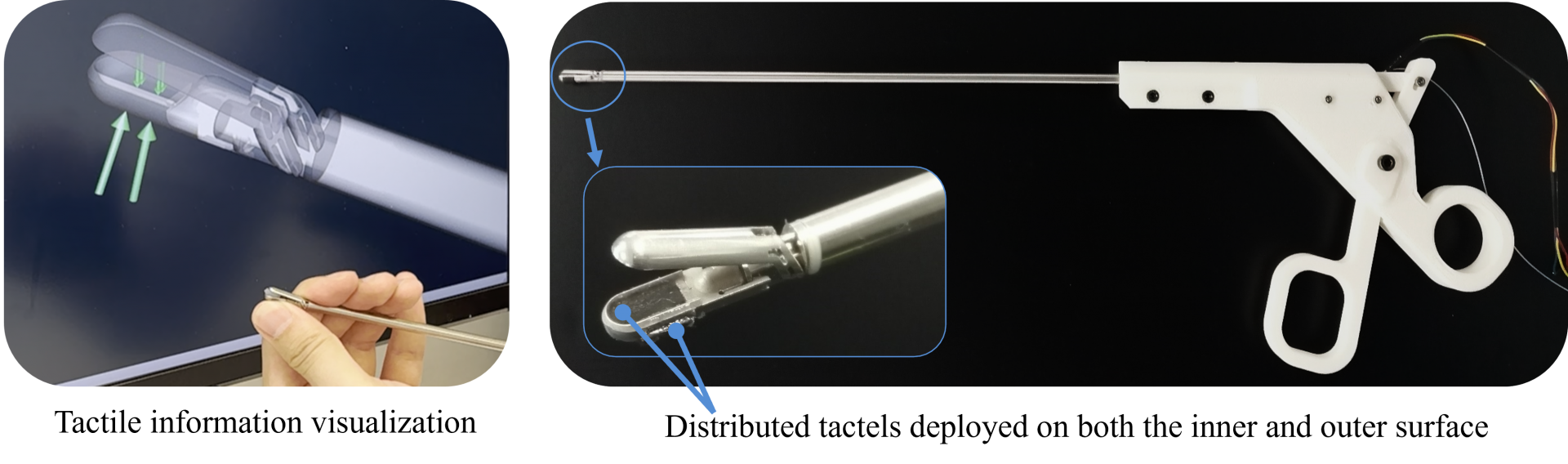
ESSENCE (Embedding Softness into Structure ENabling distributed tactile sensing of high-order Curved Surfaces) is a general principle for accurate and robust tactile sensing, providing the capability of placing the tactels on a miniaturized structure with arbitrary surfaces according to bespoke designs.
Objective
To develop distributed tactile sensing technology for complex surfaces and apply it to minimally invasive surgical instruments and medical robotic systems
Significance
- First high spatial resolution haptic surgical forceps.
- Diameter of 5mm, featuring 8 tactels deployed on both the inner surface (4 tactile sensors) and outer surface (4 tactile sensors) of the spoon-shaped jaw.
- Real-time visualization of the distributed contact forces and gripper opening angle information
Aims
- Allow palpation during the minimally invasive surgery
- Determine tissue stiffness and identify hidden blood vessel locations
- Enhance surgical safety and reduce surgical time
Contacts
For research collaboration: jian.hu@cair-cas.org.hk
For PR and industrial collaboration: jun.xu@cair-cas.org.hk
Principal Investigator: Prof WANG Shuangyi
Objective
Developing clinical-driven novel multi-purpose ultrasound robot adopting a multi-stage and modular design, featuring small size and portability, and powered by built-in intelligence.
Significance
- Innovative ultrasound robot to fulfil both diagnostic and therapeutic needs.
- With 9 active degrees of freedom, superior to other existing systems, with its core module 1.5 kg.
- First to propose physician experience migration and standard view re-identification under visual navigation.
- First to propose heartbeat gating based on image analysis and robot interaction for 3D reconstruction.
Aims
- Allow accurate manipulation of both the ultrasound probe and the treatment device robotically
- Allow remote guidance & operation by experts
- Improve the precision and ergonomics
- Reduce the training time of clinicians by automatically planning and guiding the insertion
Contacts
For research collaboration: shuangyi.wang@ia.ac.cn