Human Computer Interaction Technology
- A large-scale synthetic scene dataset with 179 household objects, 5K cluttered scenes and over 10M hand annotations.
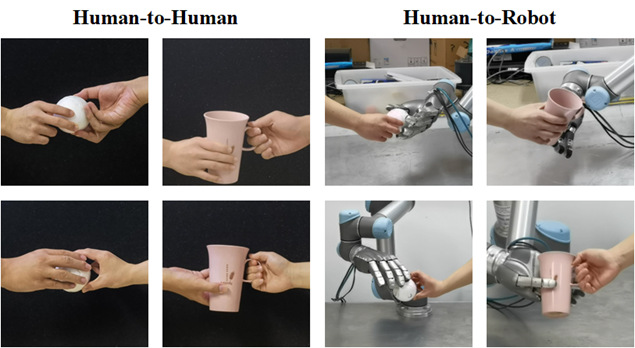
- An anthropomorphic hand grasp network (AHG-Net) that takes the single-view point clouds as input and predicts the suitable hand configurations with 5 different grasp taxonomies.
- The model can predict dense and robust hand grasps and clear over 78% of unseen objects in clutter.
- The generalizability, reliability, and robustness are demonstrated on 15 objects with arbitrary handover poses from frontal and lateral positions.
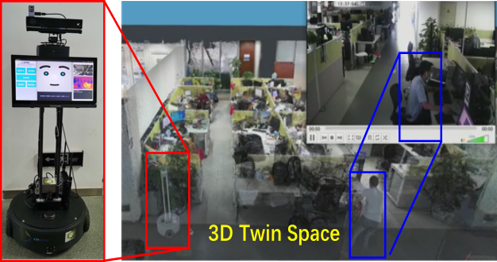
- Human-robot 3D interaction system that supports audio-visual based human computer interaction and enables human-robot interaction within a 3D virtual twin space.
- Two teams, Bravebot and Baymax, have won the first prize and second prize of 2023 Grand Challenges on Indoor Robot Learning.