R&D Projects
R&D Projects
ERCP MorphGI: MorphGI for single use and robotized ERCP
Description: ERCP is one of the most challenging GI interventions where current manual-operated ERCP endoscope technology struggles to achieve satisfactory efficacy, unlike the status quo of gastroscope and colonoscope. In China alone, it is estimated at least 1 million ERCP procedures need to be carried out annually, but only 1/10 have been conducted due to a lack of experts. In addition, ERCP is a procedure where a single-use device is highly recommended by the FDA due to the difficulty of sterilisation and the high risk of cross-infection. In the view of above facts, the single-use MorphGI robotic endoscope technology has a unique advantage in ERCP application and is very attractive to the medical device industry according to an initial market survey.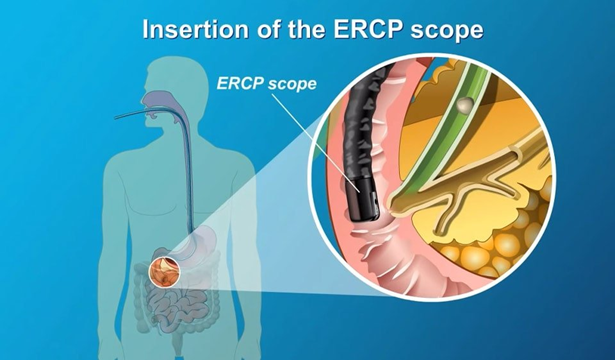

Robotized flexible photoacoustic endomicroscopy biopsy probe
Description: Photoacoustic microscopy (PAM) provides 3D sub-cellular imaging of tissue in real-time and has promising applications for tumour margin assessment. Recently, Dr Xia’s group has created a fibre-optic photoacoustic endomicroscopy probe integrated within a 20 G medical needle (inner diameter 0.6 mm). CAIR's team is developing a miniaturized sub-million-meter robotized flexible instrument. In this project, both KCL and CAIR team will work together to create a robotized endoscope that will be equipped with a fibre-optic photoacoustic endomicroscopy probe, to provide 3D histology-like images of tissue in real-time through UV light excitation for label-free in situ tumour staging and grading. This flexible biopsy probe to be developed can be either integrated into MorphGI or being a standalone device.
Haptic surgical gripper for robotic surgery
Description: KCL's Hammer Lab proposed and developed the ESSENCE sensing method to develop a surgical gripper with dense tactile elements. In this project CAIR will further investigate novel fabrication methods for miniaturization, and create surgical grippers with highly sensitive haptic feedback, including distributed pressure measurement and shear force measurement. A number of prototypes will be developed for demonstration purposes with the aim of licensing to robotic surgery companies. This project aims to be further expanded on its own after the industrial collaborator is identified.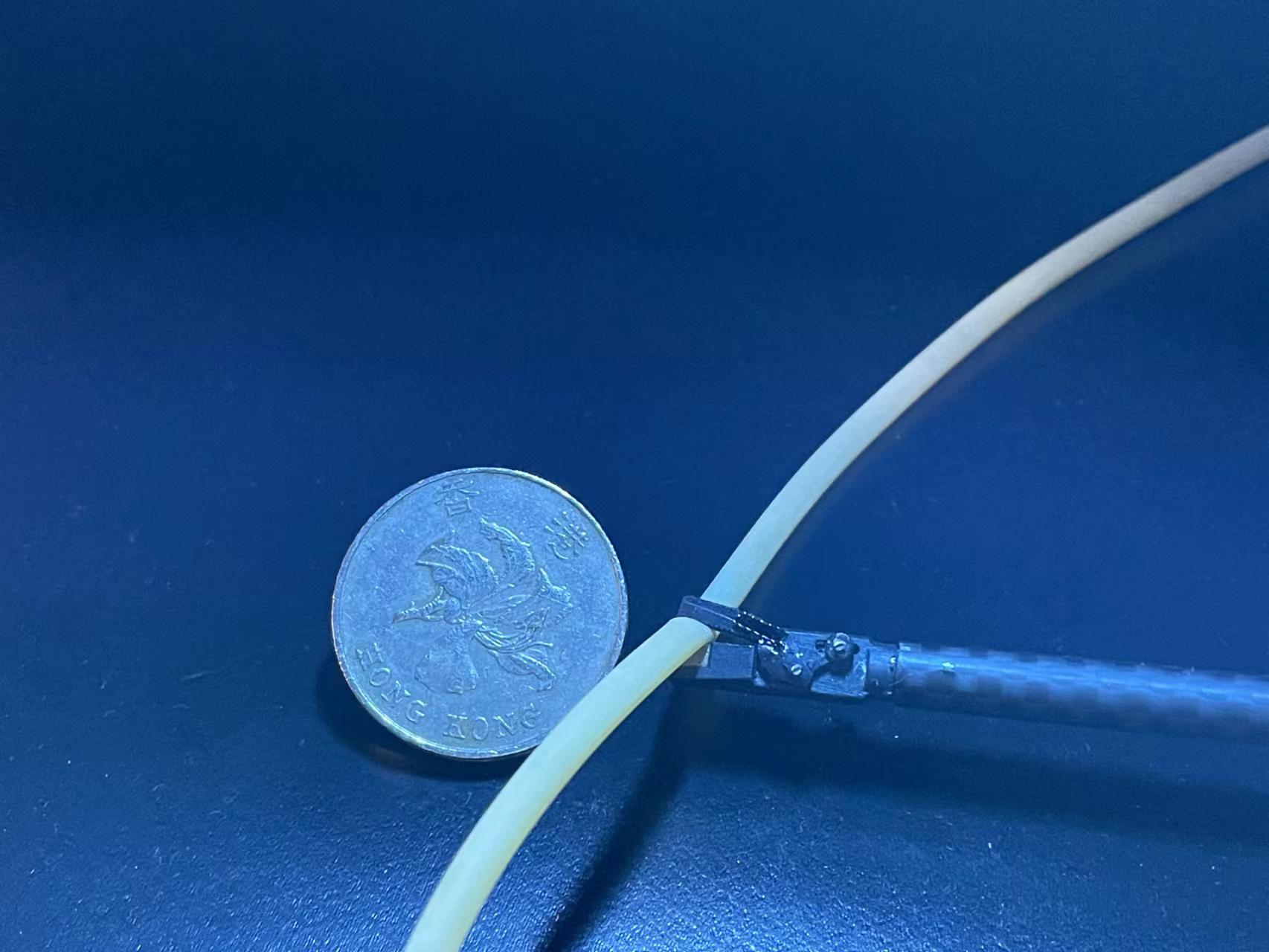
AI models for phase and action recognition for neurosurgery
Description: both KCL and CAIR have researchers working on AI models for instrument segmentation, phase and action recognition for neurosurgery. CAIR has started the partnership with the neurosurgery department of Prince of Wales Hospital and Queen Elizabeth Hospital. This project intends to provide opportunities for researchers from the joint lab to establish strong research partnerships with Hong Kong-based clinicians on AI for neurosurgery.
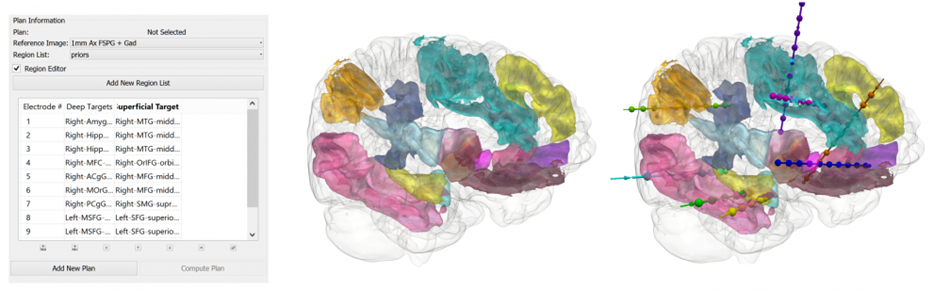
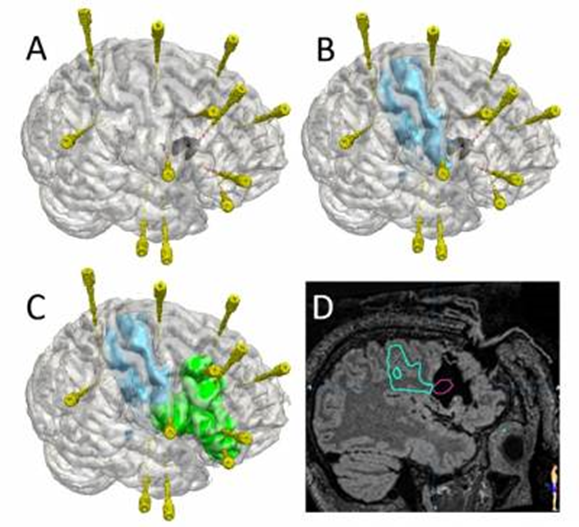
EpiNav
Description: EpiNav is an interactive 3D-neuronavigation system that simultaneously displays the anatomy of the brain and any abnormal areas, critical brain functions, arteries, veins, blood vessels and the white matter tracts that connect the different areas of the brain. Using computer-assisted guidance, this pioneering system enables the precise planning of the trajectories of electrodes in the brain in order to pinpoint the areas where seizures arise. These plans are now being used to direct a robotic system for placing the electrodes through the skull and into the brain.