
Highlights & News
CAIR支气管镜导航、软体机器人内镜成果在IEEE TMI、Soft Robotics等顶级期刊上发表
发表日期: 2025年6月27日
中国科学院香港创新研究院人工智能与机器人创新中心 (CAIR) 团队近期在支气管镜导航和软体机器人内镜领域取得多项成果,相关论文分别被医学图像处理领域顶级期刊 IEEE Transactions on Medical Imaging (TMI) 和机器人领域顶级期刊Soft Robotics 接收!
论文一:IEEE TMI 2024 | BronchoTrack: Airway Lumen Tracking for Branch-Level Bronchoscopic Localization
论文摘要:
实时定位支气管镜在气道中的位置对于确保介入手术质量至关重要,然而,传统视觉导航方法受限于速度与泛化能力的权衡。对此,本文提出了一个实时支气管镜定位框架——BronchoTrack,旨在实现基于图像的分支级导航,并首次在动物体内实验中测试了其稳定的实时定位能力。
BronchoTrack包含三个模块:轻量化的支气管腔口检测器模块、多目标腔口跟踪模块以及基于语义气道图的检测-气道关联模块。该方法首次将多目标跟踪技术引入支气管镜导航中,有效解决了由于快速镜头运动和复杂气道结构导致的识别混淆问题。此外,通过引入“语义气道图”,实现了无训练地将视觉检测结果与CT分支结构进行匹配,确保了跨患者的泛化能力。进一步地,BronchoTrack-LC扩展模块引入了闭环检测机制,提升了在失配或模糊场景中的鲁棒性。
本文在11 例患者数据及猪模型体内实验进行了验证。在患者数据上,该方法实现了81.72%的平均定位准确率,在无需任何个体化训练的前提下显著优于现有基线方法AirwayNet(36.01%)。在猪模型中,系统甚至能够定位到第八级支气管分支,验证了其实时性与深层结构识别能力。此外,相比其他主流多目标跟踪器(如BoT-SORT、ByteTrack等),BronchoTrack在跟踪精度与整体性能上均取得明显优势,处理速度高达52FPS,满足实时要求。
该框架为基于图像的介入手术导航提供了新思路,并有望与坐标级定位方法融合,为临床提供更高精度的三维引导。

BronchoTrack分支级定位框架图
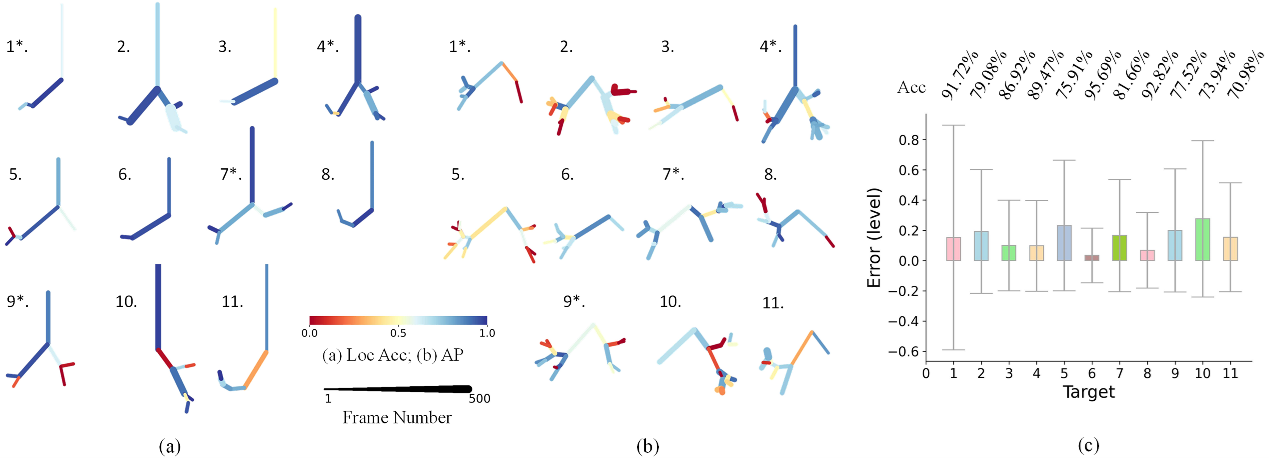
在11例临床数据中的定位效果实验验证
论文二:Soft Robotics | A Novel Pneudraulic Actuation Method to Enhance Soft Robot Control
论文摘要:
本文提出并验证了一种创新的气液混合 (Pneudraulic) 驱动方法,旨在提升软体机器人的驱动效率、动态响应和控制精度,特别是在医疗等高要求场景中。
软体机器人因其柔软性、顺应性和安全性在多个领域具有广阔的应用前景,但现有驱动方式存在明显局限:气动系统响应快但精度和力输出有限;液压系统力量大且精度高,但响应慢、体积大且噪音大。为解决这些问题,本文提出通过气液混合驱动 (PHA) 系统将气动和液压回路串联:气动部分通过空压机和比例调节器调节压力,液压部分通过水柱将压力传递至软体驱动器。采用电液类比方法,将系统建模为RLC串联电路,分析其动态特性。
实验结果表明,PHA系统相比纯气动和注射泵液压系统具有更大弯曲角度、更高一致性(重复误差<1°)和更低噪音。研究还发现减小管路长度和内径、优化气液体积配比可显著提升系统响应速度。
基于RLC理论的模型及其PID控制器实现了响应速度提升52.63%,证明PHA系统不仅提高了软体机器人性能,还简化了结构、降低了噪音和制造难度,特别适用于医疗手术和康复辅助等高要求领域。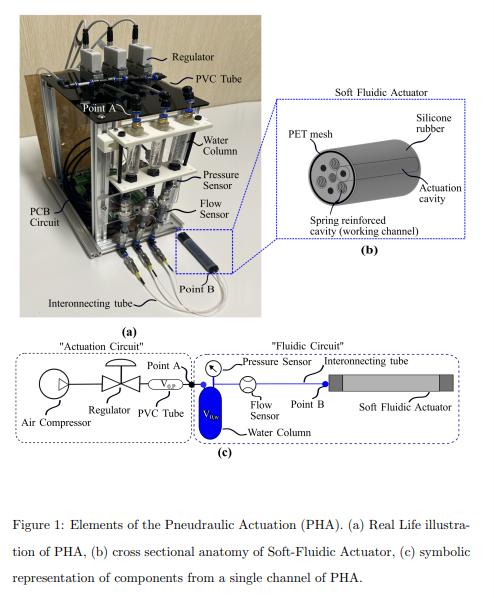
论文三:Soft Robotics | Fluidic Multichambered Actuator and Multiaxis Intrinsic Force Sensing
论文摘要:
软体机器人凭借其柔性材料和结构,在与环境进行物理交互时具有显著优势,尤其适合医疗、手术、工业抓取等需要高柔性和安全性的场景。然而,传统刚性传感器的集成会影响软体机器人的柔性和可制造性,如何在不损失本体柔性的情况下实现精准力感知成为重要挑战。针对这一问题,本文提出了一种基于液压驱动的多腔软体流体驱动器,并利用不可压缩的驱动液体同时作为驱动与本体力传感介质。
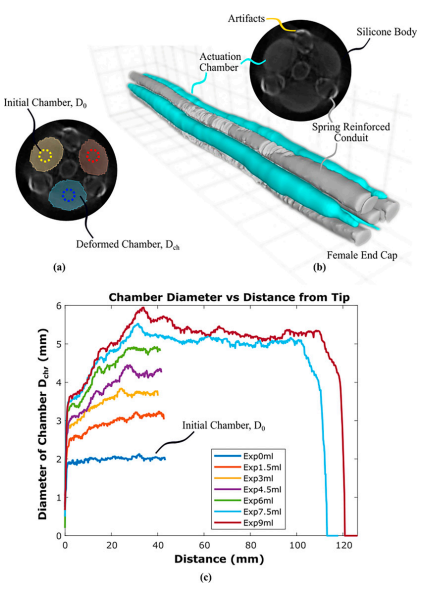
研究人员建立了腔体双轴变形的超弹性驱动压力模型,并通过CT成像对内部变形进行验证,此外,基于压力变化与外力之间的映射关系,提出了多轴本体力传感算法。该算法综合考虑了软体驱动器的几何和截面非线性,通过压力反馈实现了三维空间内集中和分布两类外力的高精度估算。
实验部分,利用COMSOL仿真分析了不同力作用下中性轴位置的变化,并通过物理实验测量和CT成像验证了建模的准确性。在不同弯曲和加载配置下,系统力感知最大绝对误差为0.32N(在0-6N范围内),表现出良好的精度和稳定性。
本文首次用CT成像定量分析了非约束流体腔体的双轴变形,提出了驱动压力的超弹性建模方法,揭示了截面和几何非线性对中性轴变化及运动学建模的影响,并实现了基于压力变化的本体三维力感知,为高柔性软体机器人在医疗及复杂交互场景中的力控制和安全性提供了理论与方法支撑,对医疗机器人等柔性系统的设计与应用具有重要意义。
CT扫描下柔性机器人受压形变

实验平台