Highlights & News
HK MedTech Hub联合实验室突破两项微创手术触觉感知技术
发表日期: 2024年2月6日
近期,英国伦敦国王学院(KCL)与中国科学院香港创新研究院人工智能与机器人创新中心(CAIR)医疗科技联合实验室HK Medtech Hub在国际机器人领域权威期刊IEEE Robotics and Automation Letters上发表了两篇论文。
两篇论文中的科研成果均由双方的青年学者和临床专家共同合作完成,探讨了机器人触觉感知技术在医疗临床领域的应用,分别介绍了“微型柔性高精度三维接触力传感器技术”和“利用深度神经网络模型基于视觉预测三维接触力的技术”。
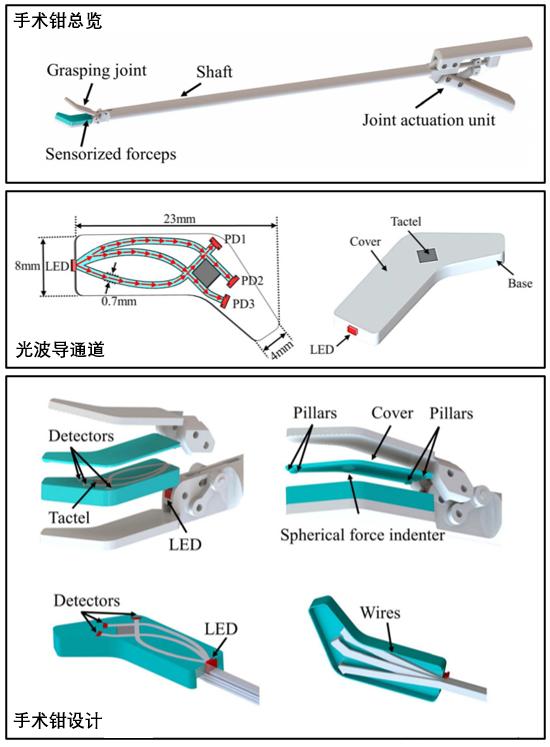
论文一:Optical-Waveguide Based 3-Axial Tactile Sensor for Minimally Invasive Surgical Instruments
论文DOI:10.1109/LRA.2023.3346756
https://ieeexplore.ieee.org/abstract/document/10373125
微创手术是一种通过小切口完成手术的现代手术技,可以减少身体伤害、减轻患者痛苦并能更快速康复,是未来手术的发展趋势。但目前微创手术的一大难题是,医生使用的器械通常无法使其感受到器械对患者施加的力度,增大手术风险。
为了解决这个问题,双方科研人员研发出了一种应用于微创手术器械的高精度三维接触力传感器。这种传感器体积很小并具有柔性特点,可以装在微创手术器械的末端曲面,感应手术时用到的多种三维接触力,比如推、拉、夹的力度和方向。该技术基于光波导原理,光在波导中传输时如果波导受到力的作用,光的传输特性(如强度)会改变。通过测量接触力对全反射的干扰程度可以检测力的大小和方向,从而使医生知道他们用了多少力,使手术操作更加精确。实验结果显示,这种传感器能够准确地测量0至3N的力,平均误差仅有0.089N。
胡健助理教授认为,这种新型传感器因为柔软和微型的特性更容易集成到手术器械中,并且能提供实时的高精度的力反馈信息,这对于微创手术来说将是一个巨大的技术进步。
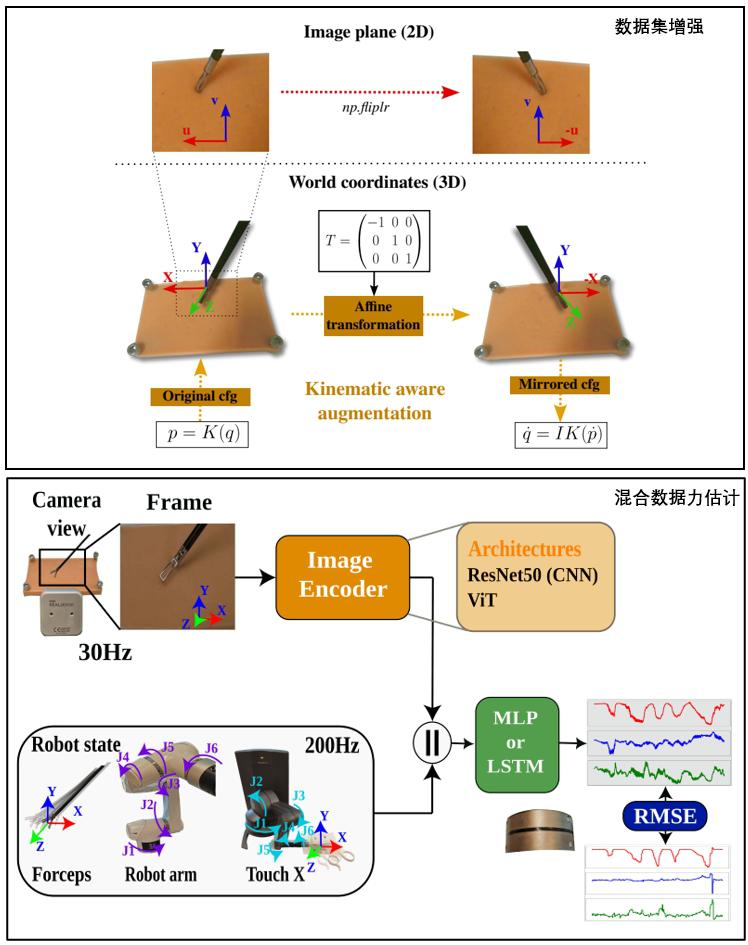
论文二:DaFoEs: Mixing Datasets towards the generalization of vision-state deep-learning Force Estimation in Minimally Invasive Robotic Surgery
作者:Mikel De Iturrate Reyzabal, Mingcong Chen, Wei Huang, Sebastien Ourselin, Hongbin Liu
原文链接:
https://arxiv.org/html/2401.09239v1